Periodic Systems: Spring-2026
HW 2 (SOLUTION): Due Day 5
- Coupled Oscillations: Three Masses
S1 5493S
Consider a system of three unequal masses in a row between two fixed walls. The walls and masses are all connected by unequal springs.
- Sketch and label a diagram for the system
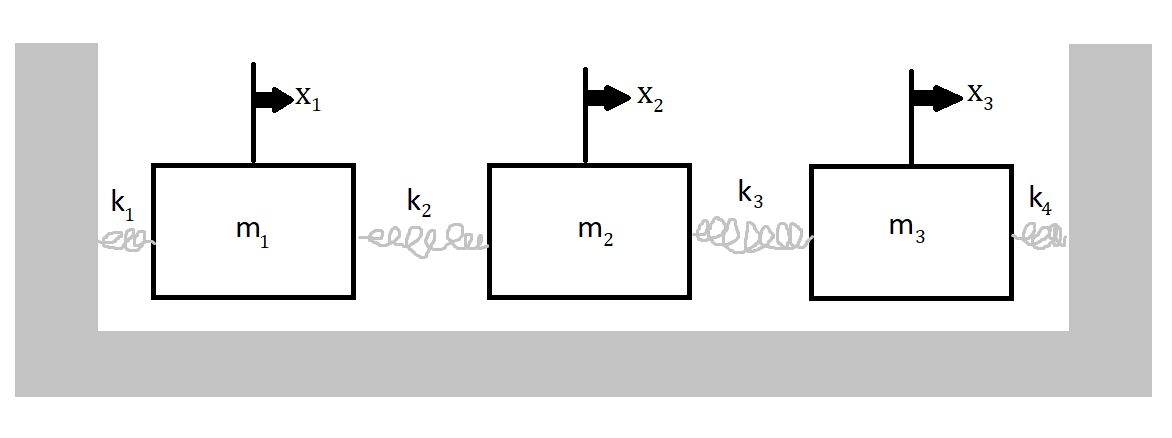
- Write a system of coupled ODEs that represents the motion of this system.
I'll use Newton's Second Law \(\left(F=\sum m\ddot{x}\right)\), where the spring forces will obey Hooke's Law \(\left( F=-kx\right)\). I can figure out the signs by imagining one block moving and seeing how the forces on each block would change as an immediate result. Doing this for each block, we get 3 differential equations:
\begin{align*} m_1\ddot x_1&=-k_1x_1-k_2x_1+k_2x_2\\&=-(k_1+k_2)x_1+k_2x_2\\ m_2\ddot x_2&=+k_2x_1-k_2x_2-k_3x_2+k_3x_3\\&=k_2x_1-(k_2+k_3)x_2+k_3x_3\\ m_3\ddot x_3&=+k_3x_2-k_3x_3-k_4x_3\\&=k_3x_2-(k_3+k_4)x_3 \end{align*}
- Rearrange your system of ODEs to find a matrix ODE.
Think of this like undoing a matrix multiplication, where I place everything with an \(x_1\) next to it in row 1 and separating the coulmns by which equation the terms came from, I have: \begin{align*} \begin{pmatrix}m_1&0&0\\0&m_2&0\\0&0&m_3\end{pmatrix}\frac{d^2}{dt^2}\begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix} &=\begin{pmatrix}-(k_1+k_2)&k_2&0\\k_2&-(k_2+k_3)&k_3\\0&k_3&-(k_3+k_4)\end{pmatrix}\begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix} \end{align*}
- Impose an appropriate Ansatz for the normal modes of this system to obtain a algebraic matrix equation.
Here I need a vector to allow me to input 3 initial conditions, one for the initial position of each mass, and a frequency (\(\omega\)) with which each system can evolve in time. I'll use the complex exponential form for oscillatory solutions. Ansatz:
\begin{align*} \begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix}=\begin{pmatrix}a\\b\\c\end{pmatrix}e^{i\omega t},\;\;\;\textrm{with unknown constants }a,b,c,\omega\\ \end{align*}
The differential equations become:
\begin{align*} \begin{pmatrix}m_1&0&0\\0&m_2&0\\0&0&m_3\end{pmatrix}(-\omega^2)\begin{pmatrix}a\\b\\c\end{pmatrix}=-K\begin{pmatrix}a\\b\\c\end{pmatrix} \end{align*}
- Find the eigenvectors and eigenvalues of this matrix equation in the special case that the system is symmetric around the central mass and all the masses are the same.
Symmetry around the middle mass \(\implies\)
\[\left.\begin{aligned} k_1&=k_4=A\\k_2&=k_3=B \end{aligned}\right\rbrace\implies K=\begin{pmatrix}A+B&-B&0\\-B&2B&-B\\0&-B&A+B\end{pmatrix}\]
All masses equal \(\implies\)
\[\begin{pmatrix}m_1&0&0\\0&m_2&0\\0&0&m_3\end{pmatrix}=mI\]
K is a \(3\times 3\) matrix, so I could just solve for the eigenvectors and eigenvalues by hand (it's messy!) or plug into Mathematica. Instead, let me look for even and odd solutions. The odd eigenvector is of the form \(\begin{pmatrix}a\\0\\-a\end{pmatrix}\).
\[\begin{pmatrix}A+B&-B&0\\-B&2B&-B\\0&-B&A+B\end{pmatrix}\begin{pmatrix}a\\0\\-a\end{pmatrix}=\lambda\begin{pmatrix}a\\0\\-a\end{pmatrix}\]
\[\left.\begin{aligned}(A+B)a&=\lambda a\implies\lambda=A+B\\-Ba+Ba&=\lambda 0\\-(A+B)a&=\lambda a\implies\lambda=A+B\end{aligned}\right\rbrace,\;\; a=\textrm{anything}\]
The even eigenvector(s) are of the form \(\begin{pmatrix}a\\b\\a\end{pmatrix}\).
\[\begin{pmatrix}A+B&-B&0\\-B&2B&-B\\0&-B&A+B\end{pmatrix}\begin{pmatrix}a\\b\\a\end{pmatrix}=\lambda\begin{pmatrix}a\\b\\a\end{pmatrix}\]
\[\left.\begin{aligned}(A+B)a-Bb&=\lambda a\\\textrm{Let }a&=B\textrm{ (note: can choose anything)}\\\implies b&=A+B-\lambda \\-2Ba+2Bb&=\lambda b\\\implies 0&=\lambda^2+(A-3B)\lambda+2AB\\\implies\lambda&=\frac{1}{2}\left((A+3B)\pm\sqrt{(A+3B)^2-8AB}\right)\end{aligned}\right\rbrace,\;\; \textrm{note: 2 solutions}\]
Therefore
\[\lambda=A+B,\frac{1}{2}\left((A+3B)\pm\sqrt{(A+3B)^2-8AB}\right)\]
and
\[v=\begin{pmatrix}B\\0\\-B\end{pmatrix},\begin{pmatrix}B\\\frac{(A-B)\pm\sqrt{(A+3B)^2-8AB}}{2}\\B\end{pmatrix}.\]
- Sensemaking: Explain briefly what these eigenvectors tell you about the normal modes of the system and why you might expect these normal modes based on the symmetries of the system.
For the first solution, the two outside masses move opposite to each other and the middle mass is stationary.
For the second and third solutions, the outside masses move the same way. Whether the middle mass moves the same way or oppositely depends on the relative sizes of \(A\) and \(B\) (i.e. \(k_1\) and \(k_2\)).
In the special case \(A=B\), i.e. all spring constants are identical, then\[b_\pm=\mp\frac{1}{2}\sqrt{8B^2}=\mp\sqrt{2}B.\]
We see that for one of the normal modes, the middle mass moves in the same direction as the other two masses, but further, and in the other case it moves oppositely, and further.
- Find the general solution for the motion of the (unforced) system in the special case that the system is symmetric around the central mass and all the masses are the same.
The general solution is \begin{align*} \begin{pmatrix}x_1(t)\\x_2(t)\\x_3(t)\end{pmatrix}=\;&\alpha_1\begin{pmatrix}1\\0\\-1\end{pmatrix}e^{i\omega t}+\beta_1\begin{pmatrix}a\\b_+\\a\end{pmatrix}e^{i\omega_+ t}+\gamma_1\begin{pmatrix}a\\b_-\\a\end{pmatrix}e^{i\omega_- t}\\&+\alpha_2\begin{pmatrix}1\\0\\-1\end{pmatrix}e^{-i\omega t}+\beta_2\begin{pmatrix}a\\b_+\\a\end{pmatrix}e^{-i\omega_+ t}+\gamma_2\begin{pmatrix}a\\b_-\\a\end{pmatrix}e^{-i\omega_- t} \end{align*}
where \(\alpha_1,\alpha_2,\beta_1,\beta_2,\gamma_1,\gamma_2\) are arbitrary constants,
(Choose \(\alpha_2=\alpha_1^*,\beta_2=\beta_1^*,\gamma_2=\gamma_1^*\) for real solutions.)
and where\begin{align*} \omega&=\sqrt{\frac{k_1+k_2}{m}}\\\omega_\pm&=\left\{\frac{1}{2m}\left[(k_1+3k_2)\pm\sqrt{(k_1+3k_2)^2-8k_1k_2}\right]\right\}^{1/2} \end{align*}
and \(a\) and \(b_\pm\) are given above.
- Sketch and label a diagram for the system